
By Tom Jow — The prospect of owning an E-MTB has been slowly creeping up on me. First one friend, then another. Let’s face it though, none of us are getting any younger. When they first came out, I was as disgusted as anyone that’s been around since the beginning of the sport. Gradually my disgust turned into acceptance, observing that “hey, you still have to pedal the thing”. However, at no time did I ever say they couldn’t be fun. I mean, who can argue against riding the same speed or faster using less power? I just wasn’t ready to get one. Until a friend made me an offer I couldn’t refuse.
Because I wasn’t shopping, I knew very little about them. This is what I knew: 1) they have a motor, 2) a battery, 3) a controller to adjust a number of assist levels, and 4) when you pedal, it assists you. After some rides and some research, I have learned a lot more.
For example, motors come in different power levels. Measured by output of torque, the motors could be broken down into three categories: full power (>85Nm), mid power (50-60Nm), lightweight (35-40Nm). In my brief research, there appears to be many more full power e-MTBs than mid power or lightweight.
The full power bikes are the most capable of going both uphill and down. Usually paired with the largest battery (>700wH) these bikes are quite heavy, 50 pounds or more. Combined with long travel suspension of more than 150mm front and rear, think of the full power e-MTB as a “self shuttle” downhill machine.
For the rider that prefers a lighter weight bike but still wants a strong assist, look to the mid power category. With 55-65Nm of torque and a smaller battery (500-600wH) these bikes weigh approximately 45-50 pounds. Even at this weight, it is heavier than most of us are accustomed to. However, with long travel suspension, the mid power bikes can still handle a wide range of terrain, both uphill and down.

The lightest weight e-MTBs tip the scale in the range of 35-45 pounds. Equipped with a motor that ranges 35-45Nm and a lightweight battery (350-450wH), these bikes offer an assist that is closer to a strong tailwind than having a motor. The rider of these lightweight e-MTBs (my guess) is someone that wants to use the assist as little as possible. Examples of this might be keeping up with strong friends on non-assisted bikes or tackling slightly longer or steeper rides than normal.
Truth be told, I didn’t even know these things before I started riding one. My first couple rides entailed just figuring out the power modes, and how strong they were (or weren’t). One thing I found out quickly was that Eco mode was barely strong enough to get the bike out of its own way. The mode Trail 1 was the sweet spot. It seemed perfectly matched for the uphill grade and my power output. Trail 2 was too strong for any tight or blind turns. But it sure was fun going up wall steep pitches. And Boost mode? Much too strong for anything that wasn’t straight and smooth.
I needed to figure out how to fix Eco mode. It just wasn’t helping enough. After a little research, I discovered I could connect to the Shimano E-tube app and make some changes to the programming. Within the app, I found many drive characteristics to adjust. Shown in the graphs in photo 1 are the power curves of the different modes. The vertical axis is the output (in torque), and the horizontal axis is input (human power). This means that the taller the curve, the higher the output. The maximum is 85. Each individual mode also has a maximum output. For example, Eco tops out at about 60. As for the horizontal axis, the flatter the curve, the more human input is required for power to match. Notice that in the Trail 2 (green) and Boost (yellow) mode, the lines are much steeper than Eco mode. When using the stronger modes, the assist begins much earlier.
|
|
|

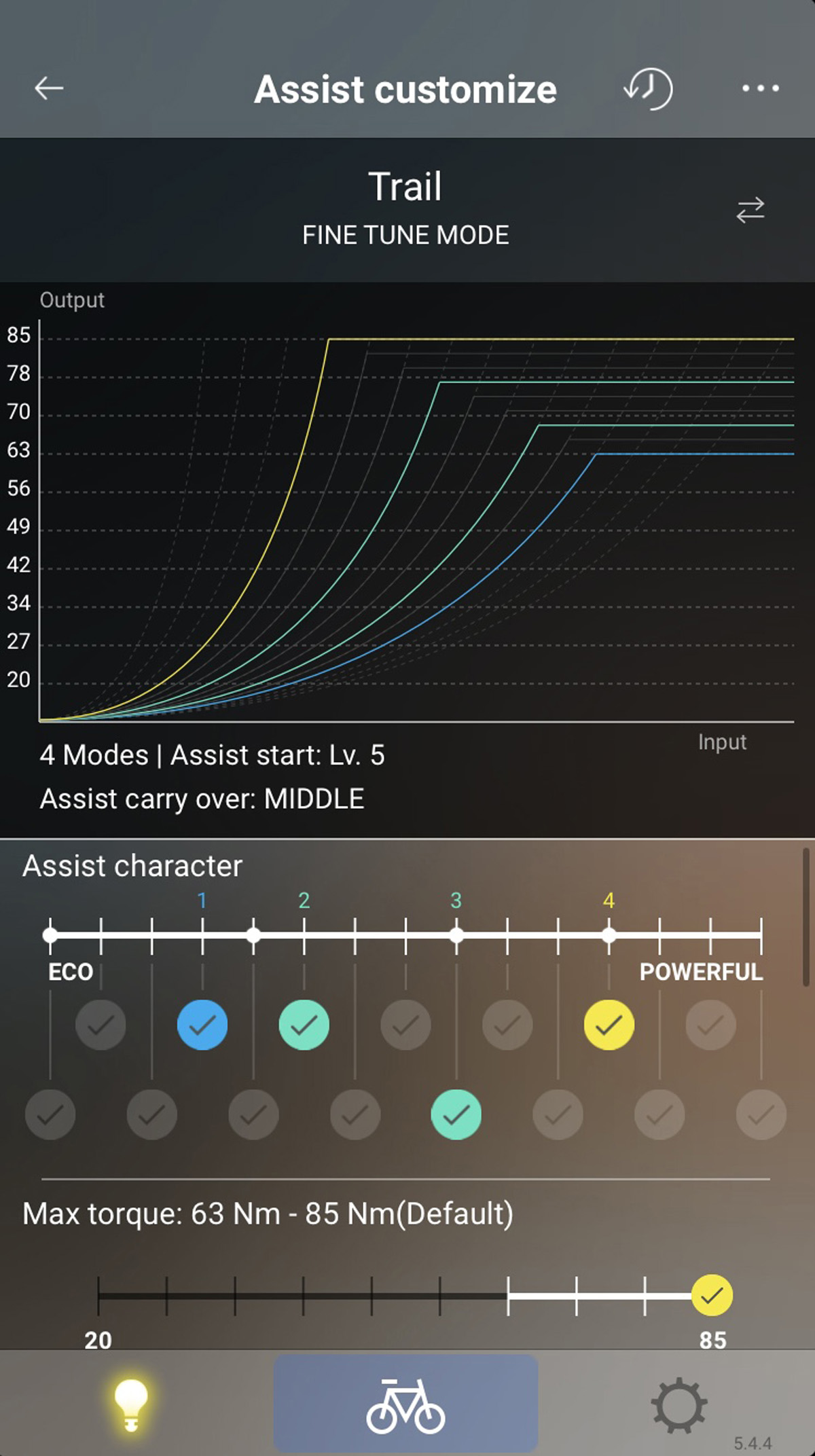
As for my needs, first I wanted to address the weak Eco mode. By moving the blue dot towards powerful (photo 2), I made the power come on a little sooner. If you look closely, you can see that the blue line in the second screenshot is a little steeper. Another adjustment I wanted to try changing was the “assist carryover”. This affects how long the motor continues to produce power after pedaling stops. It seemed to me that having a little more carryover could help get up and over obstacles. This I changed to medium. The behavior for “assist start”, which affects how the power comes on from a dead start, I chose to leave at the default of “quick”.
What a difference changing the Eco power curve made. Now I could ride in Eco mode without feeling like I was doing all the work. It is actually usable now. Assist carryover, on the other hand, is going to take a little getting used to. The anticipated benefit of having a little kick to get up rocks and steps is very helpful. However, I did not expect to be overshooting corners because the power was still on. I will have to learn to coast a little earlier to adjust for this.
Not only do I have to adapt to the carryover, but I am also learning how to pedal symbiotically with the motor. This is the key to getting the most out of the power assist. Referring back to the graphs, notice how far across the input axis the blue line for Eco mode extends, moving up the output axis gradually? This indicates that the rider must put in quite a bit of effort in order to get some return. Witness also that as we move to the more powerful modes the input requirement is reduced. The question then is: how does the motor sense input?
The motor takes into account two factors, torque and cadence. Torque, for example, is the twisting force applied to the drive spindle. When we apply high pressure to the pedals at a low cadence we are creating “high” torque. The second factor, cadence or pedal rpm, is as important; maybe even more. The reason is that the drive is programmed to be most helpful near a cadence of 80-90. If cadence is so important, what does torque have to do with it? Well, we can ride at optimum cadence in two different torque scenarios. First, we can ride in an easy gear, spinning along at 80rpm with low torque. In this instance, the motor will assist in a manner that feels like floating up the hill. On the other hand, we could pedal at the same cadence in a higher gear, pushing hard on every pedal stroke. The motor will mirror this higher torque, powering up the hill and encouraging us to keep up by adding more assist as we apply more pressure.
This feeling of being superhuman, pedaling like crazy and flying up the hill is the attraction, isn’t it? Or is it the feeling of floating along like we are using very little power? Maybe riding long distances in Eco mode using minimal assistance is more desirable? With multiple power modes we can do it all. Now I have learned that not only is the e-MTB versatile, but it is also a lot of fun. So much fun in fact, that my other bikes are at risk of collecting a lot of dust.
(Visited 28 times, 28 visits today)